
Режим работы:
по будням с 9:30 до 17:30
Опорно-поворотное устройство TL.0027
- Угол поворота∞ (360°)
- Скорость поворотадо 1800 °/сек
- Точность позиционирования0,02°
- Максимальная осевая нагрузка50 кг
- Номинальный момент силы поворота1,06 кгс×м (10.4 Н×м)
- Пиковый момент двигателя3.16 кгс×м (31 Н×м)
- Отклонение угловой скорости вращения от установленной величины, не более5%
- Тип энкодераабсолютный
- Напряжение питания ОПУ от сети постоянного тока24 ± (10 %) В
- Ток, передаваемый на нагрузку, не более30 А
- Напряжение питания постоянного тока, передаваемого на полезную нагрузку, не более200 В
- Интерфейс управления (способ связи с ОПУ)Ethernet (1000BASE-T / 100BASE-TX / 10BASE-T); RS-485 в режиме полудуплекс (до 115200 б/сек)
- Протокол управленияБуквенный протокол «Техлазер» и Pelco-D
- Канал передачи данных полезной нагрузки1×Ethernet (1000BASE-T / 100BASE-TX / 10BASE-T); 1×RS-485 в режиме полудуплекс (до 115200 б/сек)
- Допустимая осевая нагрузка, не более50 кг
- Степень защиты, обеспечиваемая оболочкой (IP)IP66
- Климатическое исполнениеВ1+ (соляной туман)
- Рабочая температура эксплуатацииот -40 до +70 °С
- Габаритные размеры, не более246×239×158 мм
- Масса, не более12,5 кг
- ПроизводительООО ТехЛазер (СПб, Россия)
Стоимость по запросу
Одноосевое опорно-поворотное устройство (ОПУ) управляется по протоколам Pelco-D и сервисному протоколу ТехЛазер.
Является полноценной заменой поворотных устройств других производителей, как западных, так и китайских.
ЗапроситьТехнические характеристики
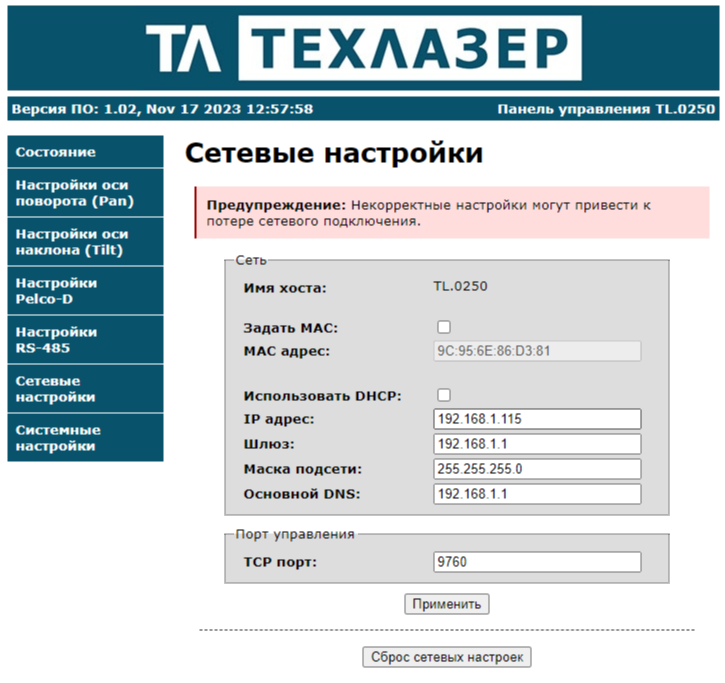
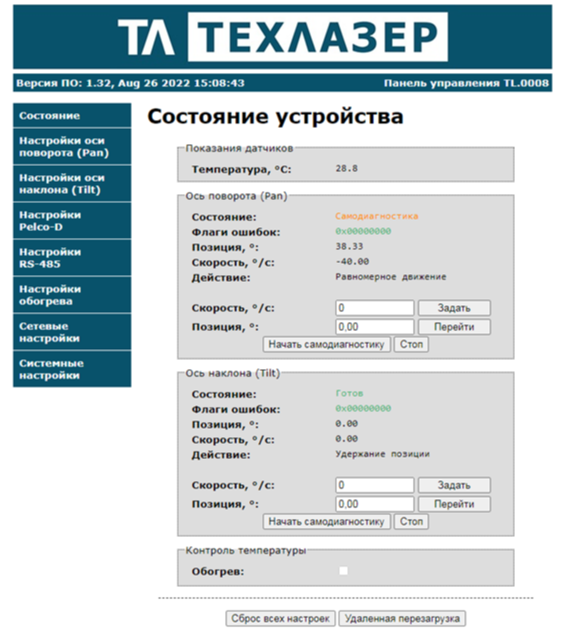
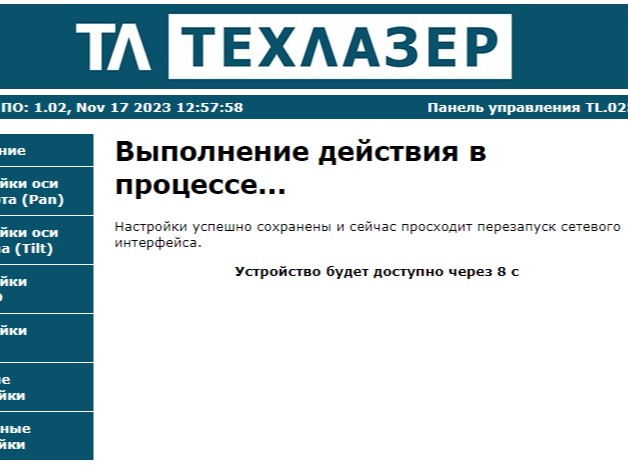
Удобный веб-интерфейс
Каждое наше ОПУ имеет простой и понятный веб-интерфейс, с помощью которого можно настроить, контролировать состояние и управлять опорно-поворотным устройством. Доступ к веб-интерфейсу можно получить по ip-адресу 192.168.1.115 (по-умолчанию) вбив его в адресной строке любого браузера.
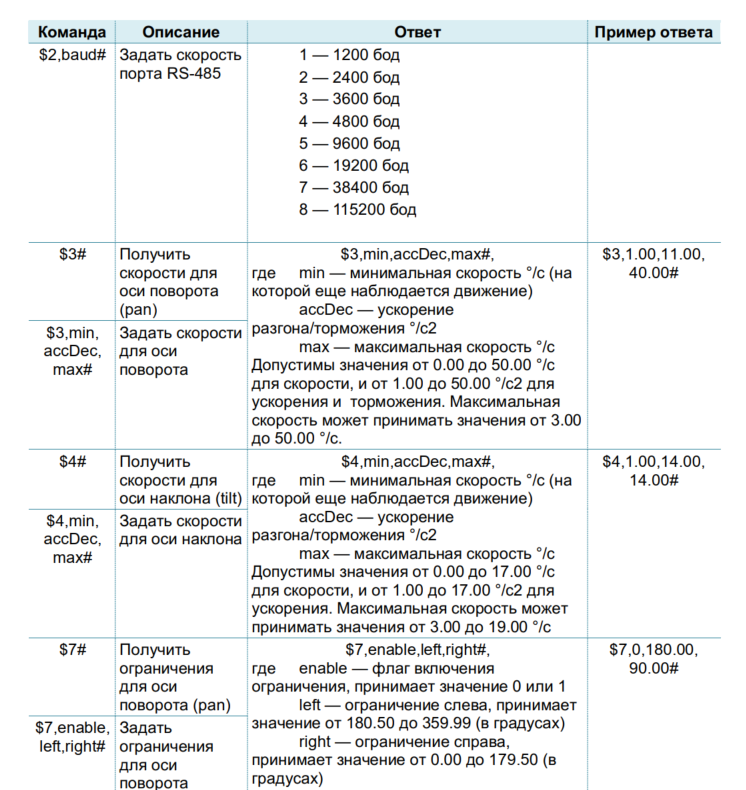
Протокол ТехЛазер на ASCII-кодах
Опорно-поворотное устройство управляется при помощи ASCII-кодов, с помощью которых можно считать и задать настройки ОПУ, задать и считать скорости поворота/наклона, задать и считать текущую позицию в градусах.
Что может быть проще?
Все команды имеют вид $x,x_param#,
где $ - открывающий символ,
x - команда,
x_param - параметры,
# - закрывающий символ.
Для удобства пользователей в протоколе ТехЛазер, и в веб-интерфейсе позиции, скорости и ускорения задаются в международной системе единиц (СИ).
Что может быть проще?
Все команды имеют вид $x,x_param#,
где $ - открывающий символ,
x - команда,
x_param - параметры,
# - закрывающий символ.
Для удобства пользователей в протоколе ТехЛазер, и в веб-интерфейсе позиции, скорости и ускорения задаются в международной системе единиц (СИ).
Отправить запрос на ОПУ TL.0027
Введите свои данные для связи. Наш специалист в кратчайшие сроки свяжется с Вами.
Запросите стоимость устройства прямо сейчас
Поможем с выбором, модифицируем устройство под ваши задачи, предложим лучшую цену среди конкурентов
Запросить