
Режим работы:
по будням с 9:30 до 17:30
Представленное ОПУ имеет множество модификаций, благодаря широкому выбору опций
Цвет, кабельные вводы или разъёмы и их расположение, количество Ethernet для полезной нагрузки, вывод питания и/или Ethernet на левую и/или правую стороны.
Опорно-поворотное устройство TL.0105-0xx
- Угол поворота∞ (360°)
- Угол наклонаот 0° до 50°
- Скорость поворотаот 0,01 до 50 °/сек
- Точность позиционирования0,3°
- Максимальная осевая нагрузка10 кг
- Максимальный момент силы поворота0,4 ± (10 %) кгс×м
- Интерфейс управленияEthernet
- Протокол управленияпротокол Техлазер и Pelco-D
- Стандарт Ethernet10/100BASE-T
- Напряжение питания ОПУ и полезной нагрузки24 В (пост.ток)
- Ток, передаваемый на нагрузку, не более12 А
- Степень защиты (IP)IP65
- Рабочая температура эксплуатацииот -40 до +50 °С
- Габаритные размеры, не более130×168×164 мм
- Масса нетто2,9 кг
- Производитель и изготовительООО ТехЛазер (СПб, Россия)
Стоимость по запросу
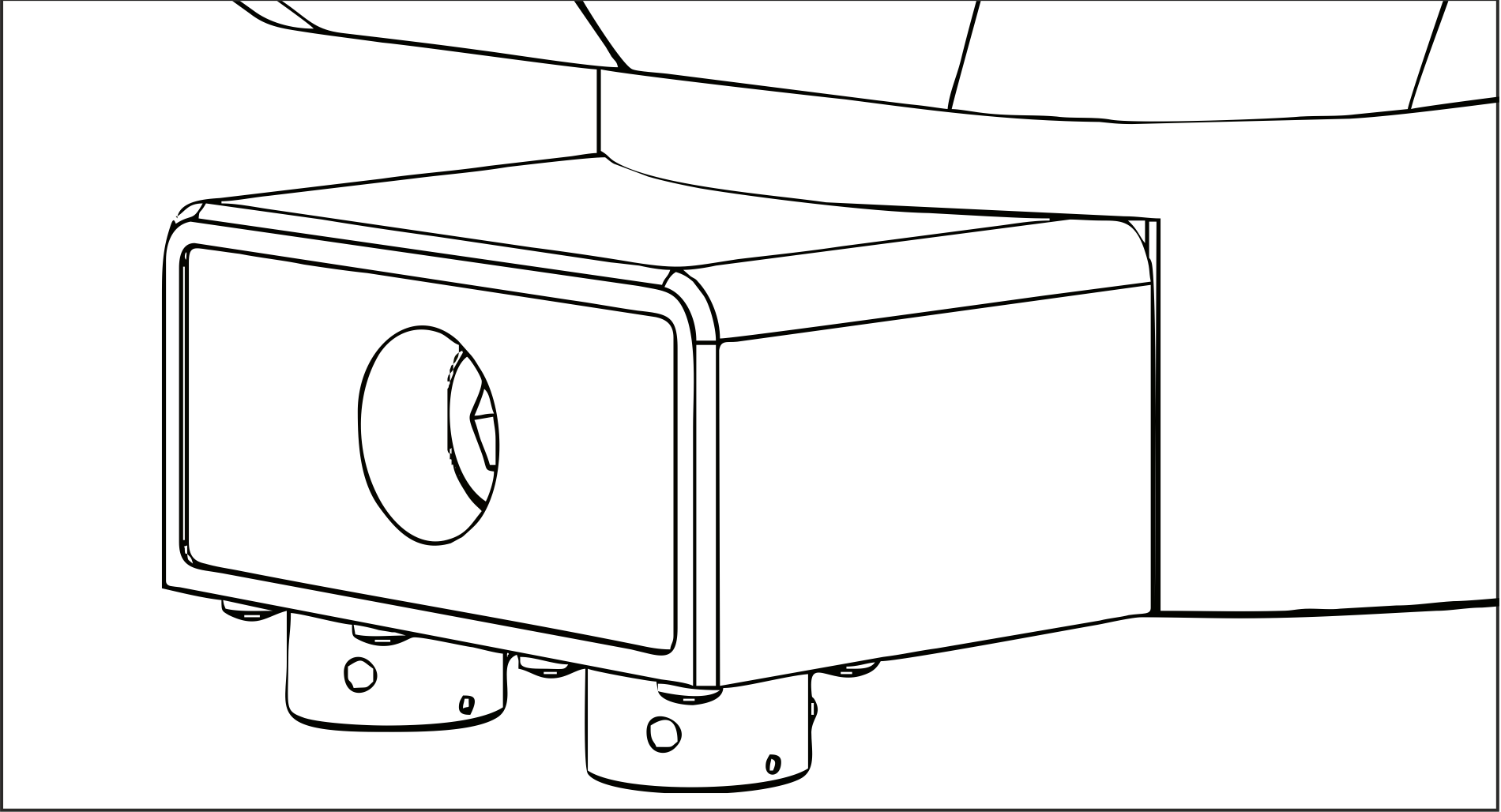
Миниатюрное опорно-поворотное устройство (ОПУ) позволяет дистанционно вращать и позиционировать полезную нагрузку по азимуту (поворот, в горизонтальной плоскости). По углу места (наклон, в вертикальной плоскости) платформа регулируется вручную и имеет 6 положений.
Запросить
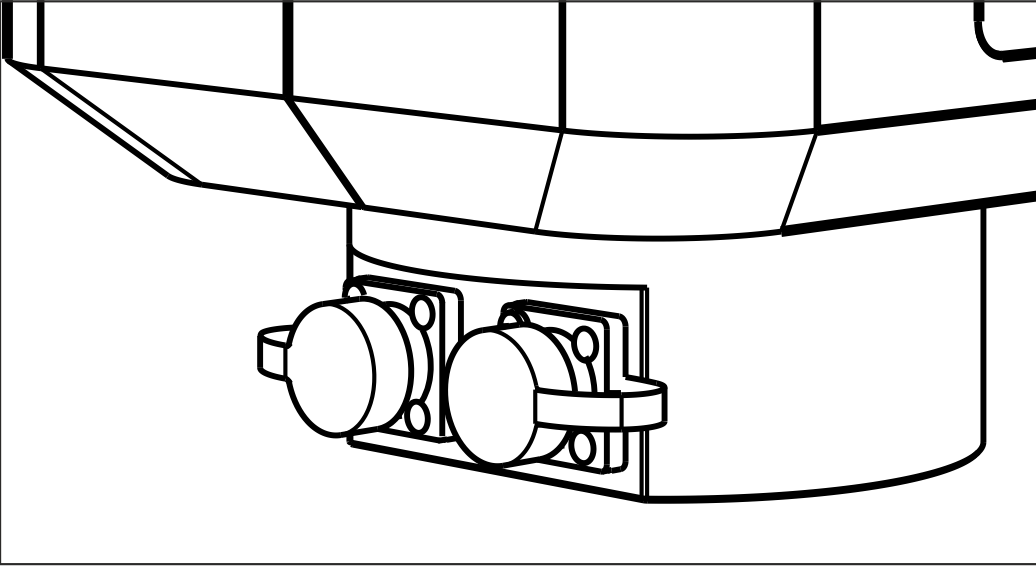 Кабельный вводРазъёмы горизонтальноРазъёмы вертикально вниз
Кабельный вводРазъёмы горизонтальноРазъёмы вертикально внизВид подключения к ОПУ (стационарная часть)
Цвет (выбирается при заказе)
RAL 6003RAL 7013RAL 7035RAL 9003Другой по запросуТехнические характеристики
Дополнительная комплектация:
- для крепления на штатив
Подходит для моделей ОПУ TL.0009, TL.0192, TL.0105
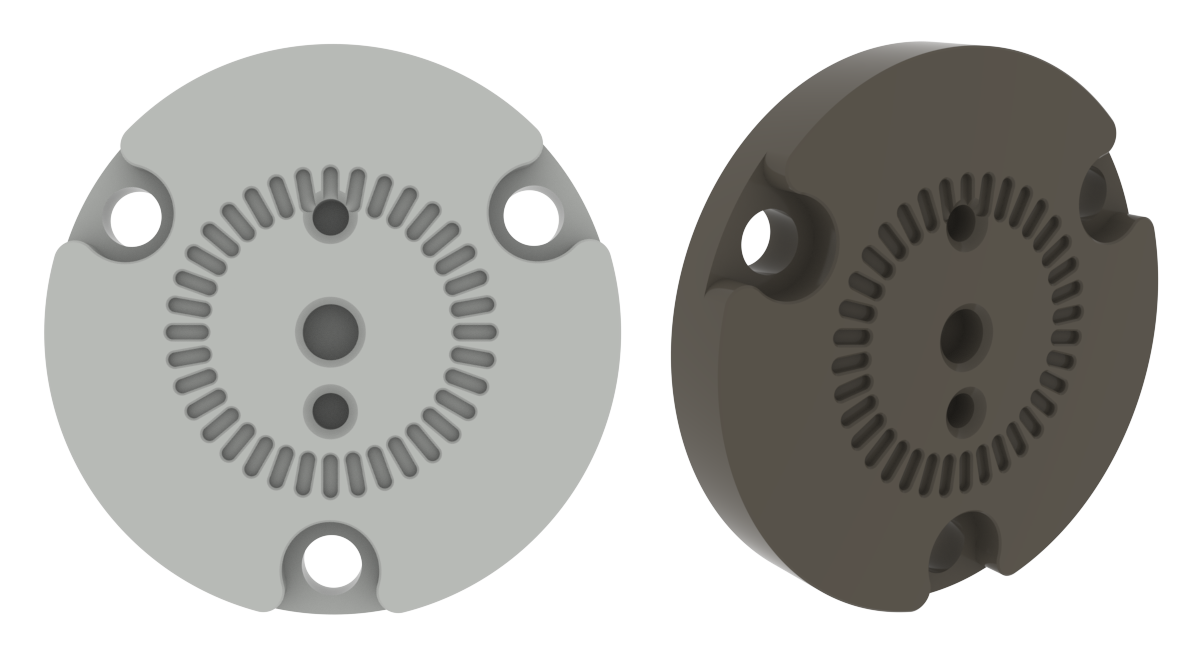
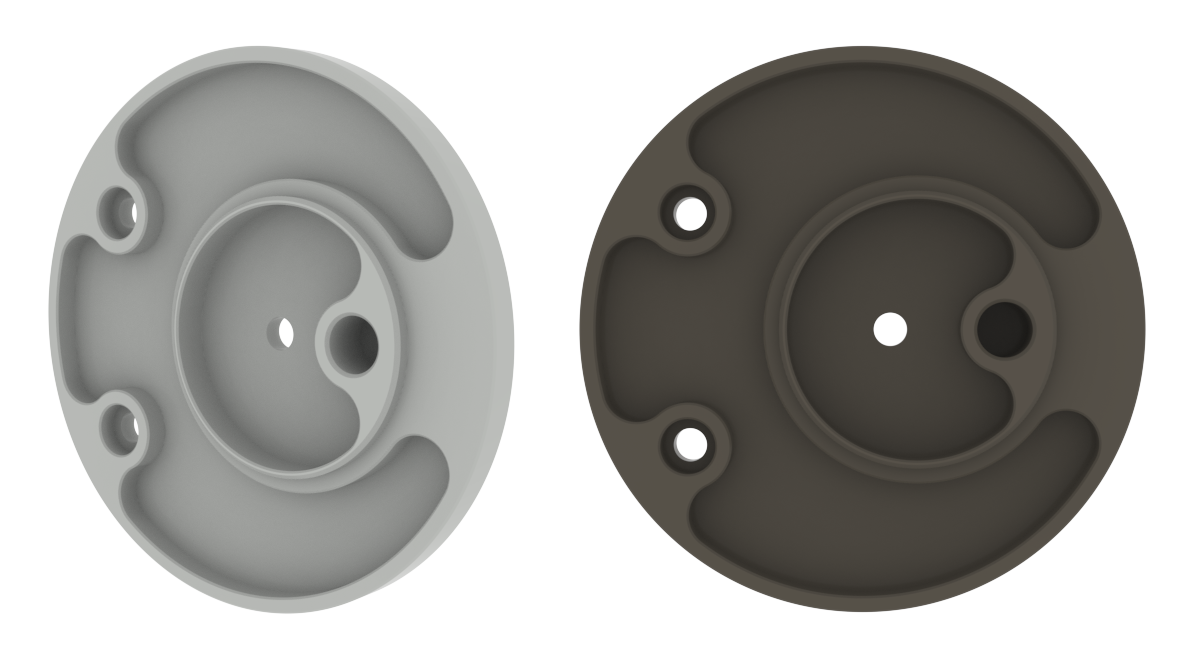
Центральное отверстие с резьбой 3/8-16 UNC
Центральное отверстие с резьбой 5/8-11 UNC
Переходник на треногу для крепления на штатив
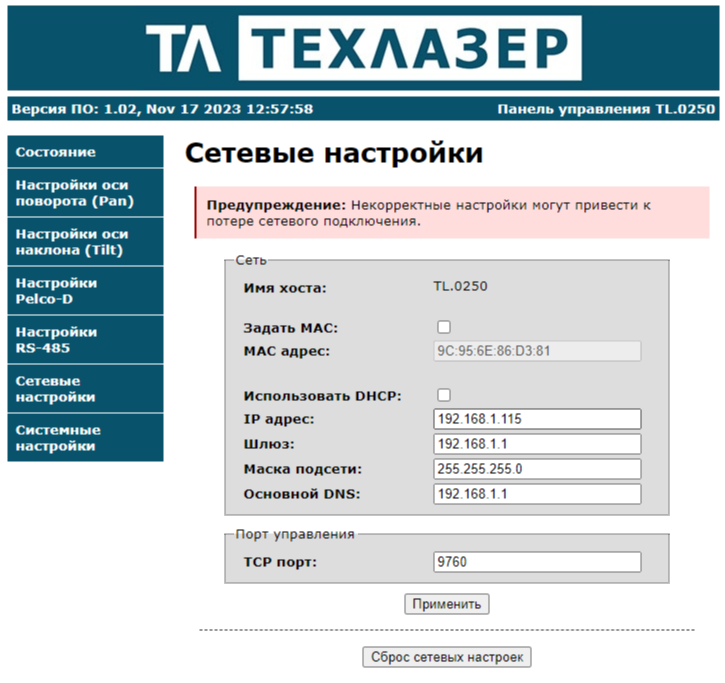
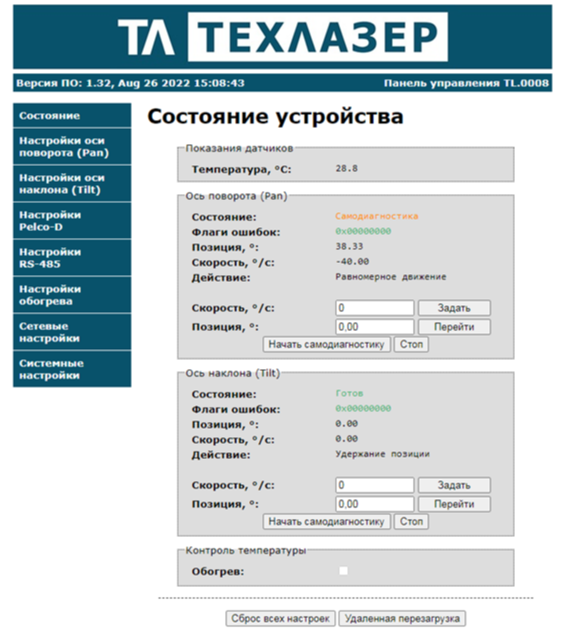
Удобный веб-интерфейс
Каждое наше ОПУ имеет простой и понятный веб-интерфейс, с помощью которого можно настроить, контролировать состояние и управлять опорно-поворотным устройством. Доступ к веб-интерфейсу можно получить по ip-адресу 192.168.1.115 (по-умолчанию) вбив его в адресной строке любого браузера.
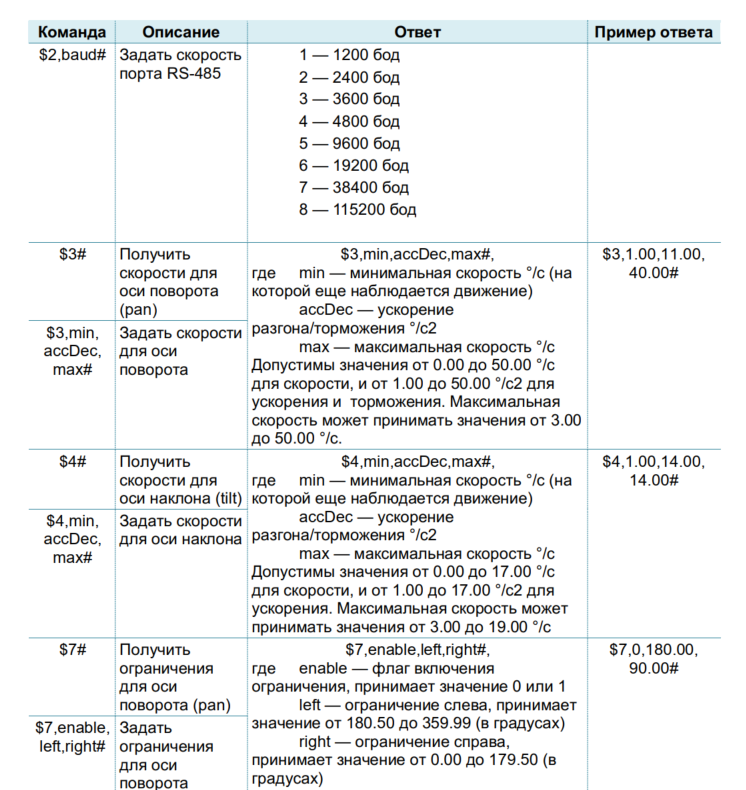
Протокол ТехЛазер на ASCII-кодах
Опорно-поворотное устройство управляется при помощи ASCII-кодов, с помощью которых можно считать и задать настройки ОПУ, задать и считать скорости поворота/наклона, задать и считать текущую позицию в градусах.
Что может быть проще?
Все команды имеют вид $x,x_param#,
где $ - открывающий символ,
x - команда,
x_param - параметры,
# - закрывающий символ.
Для удобства пользователей в протоколе ТехЛазер, и в веб-интерфейсе позиции, скорости и ускорения задаются в международной системе единиц (СИ).
Что может быть проще?
Все команды имеют вид $x,x_param#,
где $ - открывающий символ,
x - команда,
x_param - параметры,
# - закрывающий символ.
Для удобства пользователей в протоколе ТехЛазер, и в веб-интерфейсе позиции, скорости и ускорения задаются в международной системе единиц (СИ).
Отправить запрос на ОПУ TL.0105
Введите свои данные для связи. Наш специалист в кратчайшие сроки свяжется с Вами.
Запросите стоимость устройства прямо сейчас
Поможем с выбором, модифицируем устройство под ваши задачи, предложим лучшую цену среди конкурентов
Запросить